10
Aug
If you’re looking for classification of robots based on coordinate system pictures information related to the classification of robots based on coordinate system keyword, you have come to the ideal site. Our site frequently gives you hints for viewing the maximum quality video and picture content, please kindly surf and find more enlightening video articles and images that match your interests.
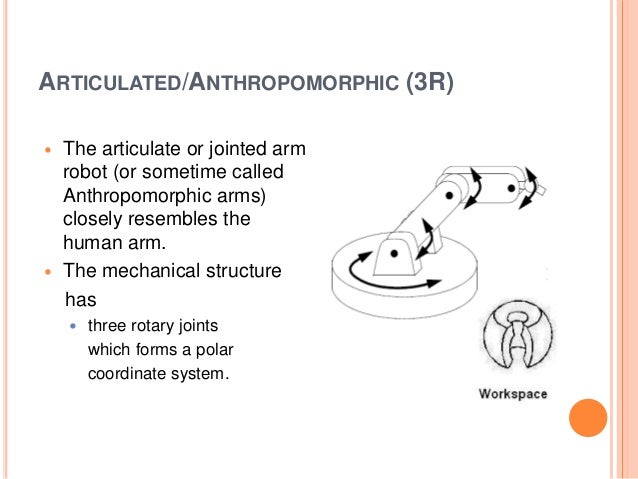
Classification Of Robots Based On Coordinate System. Consist of links connected by linear joints L. Cartesian - These are also called rectilinear or gantry robots. A robot whose arm has at least three rotary joints. When arms of a robot move in the XYZ rectangular coordinate system it is known as a Cartesian robot.
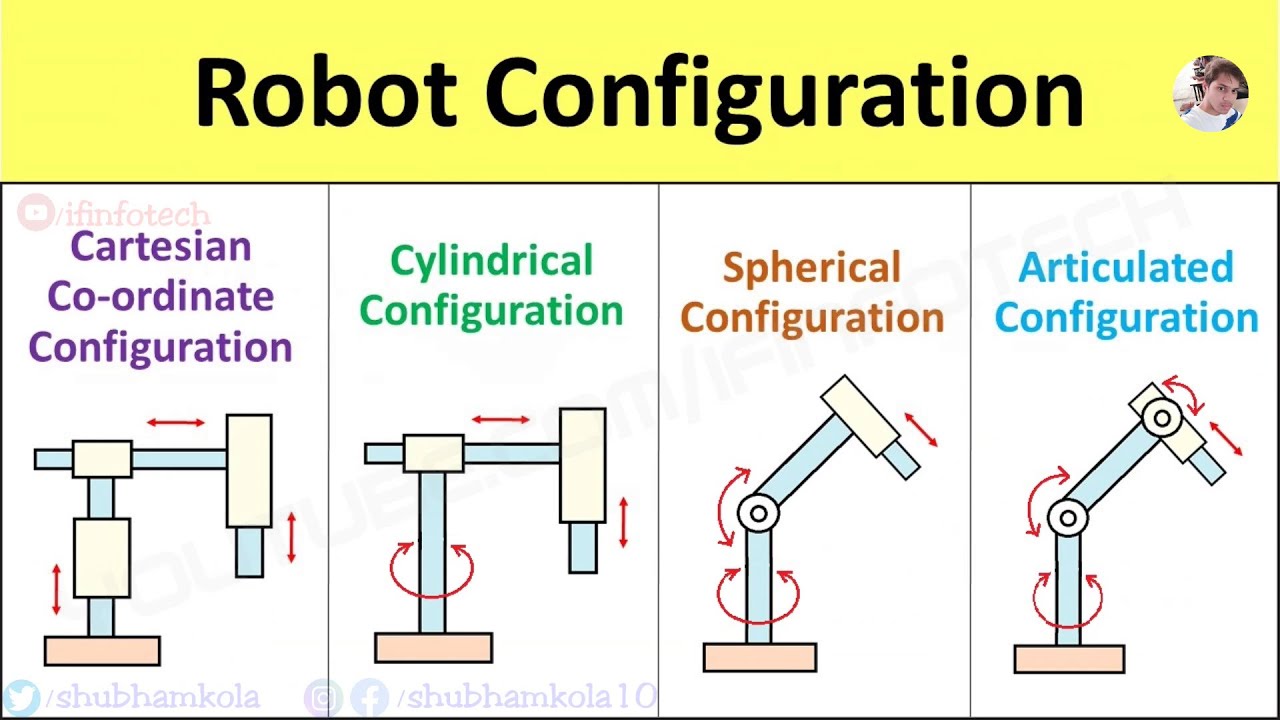
They can be divided into fixed robots ie. The ROBOOT-Koordinatensystem is a cartesian coordinate system which has its origin at the footprint of a robot. They also may have an attached wrist to allow for rotational movement. A is designated as LLL they are also called rectilinear robots. Robot Classification and Robot Reach Classification based on Physical configurations four basic configurations are identified with most of the commercially available industrial robots. Robot whose arm has three prismatic joints and whose axes are coincident with a cartesian coordinate system SCARA robot.
Robot Tool coordinate system. Robot origin coordinate system or ROBROOT coordinate system. Two-coordinate robots three-coordinate robots four-coordinate robots five-coordinate robots six-coordinate robots. Classification of robots based on the workspace geometry It is the most commonly used robot type in the industries. Robots with a cylindrical coordinate system have a relatively simple structure where one twisting joint T is added to two typical linear coordinates L. Cartesian - These are also called rectilinear or gantry robots.
Next post
Classification of risk in finance